


打印・
保存产品手册
保存产品手册
真空搬送机器人
ELEC/COVOT 系列
COVOT
ULVAC
COVOT-LC没有Z軸、是简单又合理的真空搬送机械手。
特点
- 根据行经,转弯半径,手臂数量,有多种可选。
- 支持10-6Pa的高真空。
用途
- 半导体设备的自动晶片搬送
- 各种真空实验设备的基板搬送
规格
| COVOT-LC | ELEC-RZ | COVOT-6-X5 | ||
| 使用压力范围 | to 10-5Pa | to 10-6Pa | to 10-1Pa | |
| 晶片尺寸 | 200mm/300mm | 200mm/300mm | 300mm | |
| 晶片把持片数 | 1 or 2 | 1 or 2 | 4 | |
| 最大到达距离*1 | 880mm | 1050mm | 880mm | |
| 旋转角度 | -15° to 375° | ±210° | 360° Endless | |
| 升降行程 | - | 50mm | 90mm | |
| 最小旋转直径 *1 | 802mm | 944mm | 980mm | |
| 可搬重量(含机械手) | 1kg | 1kg | 1kg | |
| 动作速度 | R | Max 2.5sec / 全行程 | Max 2.5sec / 全行程 | Max 1.5sec / full stroke |
| Θ | Max 2.5sec / 180° | Max 3.0sec / 180° | Max 2.0sec / 180° | |
| Z | - | Max 1.5sec / 20mm | Max 1.5sec / 20mm | |
| 重复位置精度 | R | ±0.2mm | ±0.1mm | ±0.2mm |
| Θ | ±0.2mm | ±0.2mm | ±0.2mm | |
| Z | - | ±0.2mm | ±0.2mm | |
| 示教器 | 选购配件 | 附属 | 附属 | |
| 控制器 | 内置 | 外置 | 外置 | |
*1 因安装臂和机械手而异。
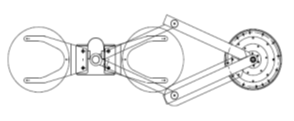
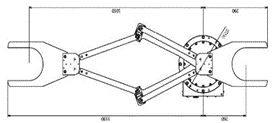
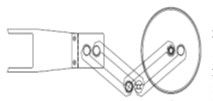
手臂选择列表
| Standard arm | Standard arm | Arm for COVOT-LC | Arm for COVOT-6 |
||||
| Arm model |
252 | 271 | 325 | 419 | 424 | FRV | CV6 |
| Maximum distance (mm) *1 |
700 | 760 | 880 | 1040 | 1050 | 740 | 880 |
| Minimum rotation diameter (mm) *1 |
606 | 644 | 802 | 940 | 964 | 600 | 980 |
| Number of wafer |
1or 2 | 1 | 4 | ||||
| Outline drawing *2 |
 |
 |
 |
Arm for COVOT-6 |
|||
| ELEC-RZ | ○ | ○ | ○ | ○ | ○ | × | × |
| COVOT- LC |
○ | ○ | ○ | × | × | ○ | × |
| COVOT-6 | × | × | × | × | × | × | ○ |
*1 Maximum distance is referential value when the robot use our hand for Φ300mm (option).
*2 Hand(Pick-up) is not included our robot. Please ask us when you need it.